简介:本作品是一种具有自主导航能力的无人艇,可通过机器视觉实现自动识别、追踪并打捞湖面垃圾,实现高效清理湖面垃圾的目标,同时具有实时监视周边环境的功能。该成果获得如下项目资助:2020年广东省科技创新战略专项资金资助立项项目(pdjh2020b0578)、2019年国家级大学生创新创业训练计划项目(201911819004)。授权国内实用新型专利1件:一种基于双体船的湖面垃圾回收装置(专利号:ZL201920024386.8)。软件著作权登记1项:基于机器视觉的自主导航湖面垃圾回收无人艇软件系统(2019SR0880781)。在国内专业期刊《工业控制计算机》发表学术论文1篇。参加大学生创新创业竞赛项目获得省一等奖1项、赛铜奖2项:第十六届“挑战杯”广东大学生课外学术科技作品竞赛一等奖、第五届中国“互联网+”大学生创新创业大赛广东省分赛铜奖、第十二届“挑战杯”广东大学生创业大赛铜奖。
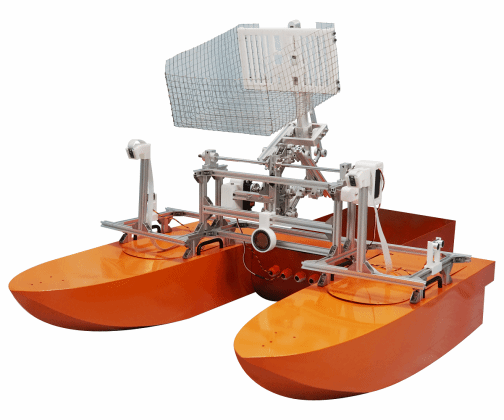
图1 成果实物图

图2 第十六届“挑战杯”广东大学生课外学术科技作品竞赛一等奖

图 3 第五届中国“互联网+”大学生创新创业大赛广东省分赛铜奖

图 4 第十二届“挑战杯”广东大学生创业大赛铜奖

图5 专利证书

图 6 软件著作权登记证书

