仿生机器鱼篇:
自然界中大部分鱼类依靠身体和尾鳍的波动推动来驱动自身的运动。仿照该类鱼游形式的水下机器人具有游动效率高、噪声低、隐蔽性好等特点,能够在水体中执行巡逻监测、探测搜索、情报收集等任务,在水下资源探测开发、国家安全防卫等方面具有广阔的应用前景。
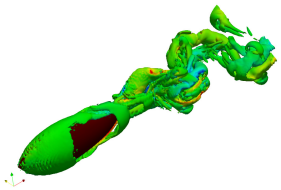
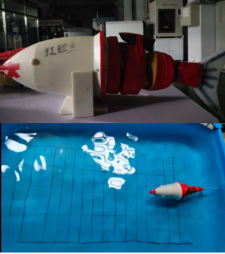
本项目中基于高精度的流体动力学数值模拟论证,设计制作一款智能避障软体机器鱼,该机器鱼仿照自然中应用最广泛的身体-尾鳍波动推进模式,采用软体硅胶尾鳍连接三个串联的舵机的形式,来达到实现S型摆动提供推力。同时结合机器视觉避障和蓝牙信号通讯,能够在水下巡逻、转弯等。目前已经设计制造出三代机器鱼,游动速度为0.5身长/秒。本项目已发表学术论文3篇,提交国家专利1项。